В статике и в динамике
Измерения расстояний, зазоров или поиск соударений можно осуществлять как для неподвижной сборки, так и в динамичеких сценах, когда требуется интерактивное перемещение деталей или симуляция механизмов.
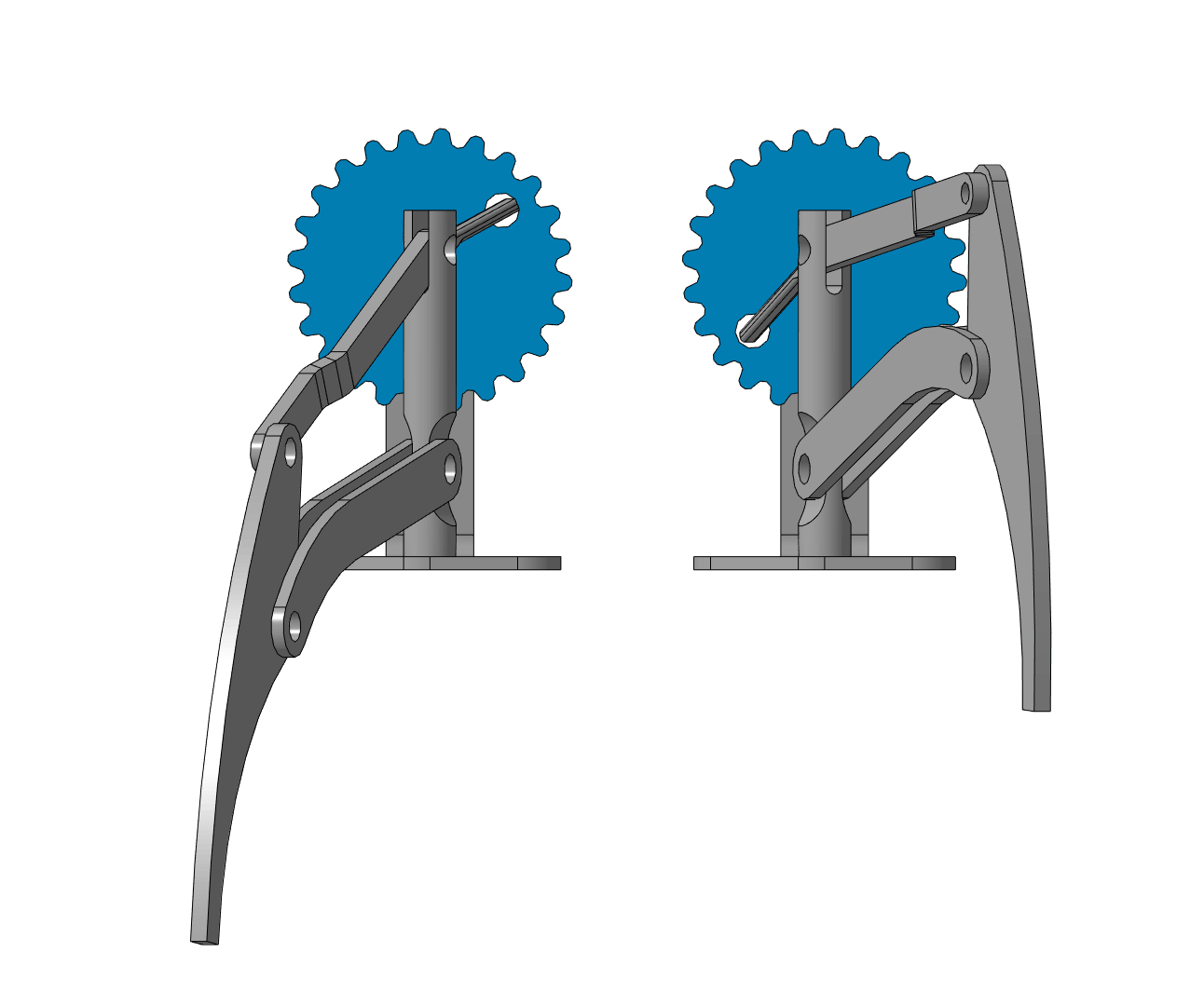
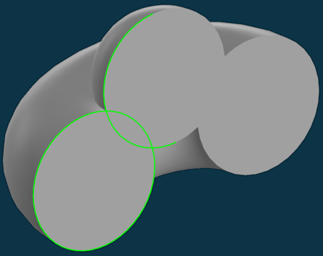
На этапе проектирования сборочного изделия необходимо убедиться в том, что между частями сборки отсутствуют пространственные наложения — коллизии.
Модуль обнаружения столкновений позволяет инженерному приложению (CAD, BIM и т.п.) проверить модели на коллизии, чтобы на раннем этапе предотвратить нарушения сборки или устранить препятствия движению частей механизма. Раннее выявление ошибок моделирования снижает издержки на этапе изготовления изделия.
Функция измерения расстояния позволяет проверять необходимые зазоры между деталями или подсборками.
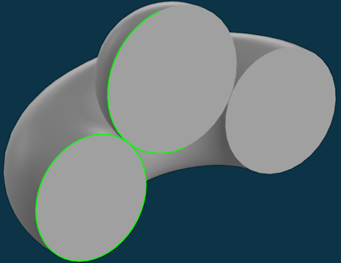
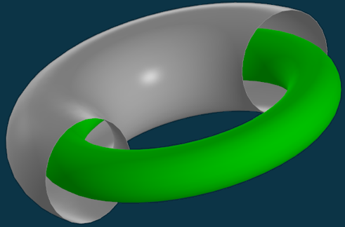
Детектор столкновений гарантирует точность своих результатов при работе с геометрией тел в граничном представлении (Boundary representation). При необходимости можно использовать полигональное представление, в том числе для ускорения расчетов.
Детектор столкновений предоставляет возможность приложению настраивать уровень детализации поиска.
В одном случае требуется найти все грани пересечения тел, в другом случае достаточно выявить факт столкновения пар тел или целых подсборок без демонстрации подробностей пересечения. Также можно исключать из поиска некоторые пары и выбирать разные стратегии поиска возможных коллизий. Можно классифицировать результаты поиска как касания или объемные пересечения.